TYRCZ-1工业机器人拆装与调试实训装置
一、系统组成
工业机器人拆装与调试实训装置选用了先进的6关节机器人,通过对6关节机器人本体的组装与拆解,以及电气柜的组装与调试,学习机械的的工作原理与调试方法。通过机器人标定与测量,了解机器人特性,在实际应用中充分发挥机器人的性能。在掌握机器人基础知识后,增加了机器人常用应用操作,如机器人精度测量、标定、机器人轨迹训练、工件搬运操作、写字操作等。通过应用开发学习,掌握机器人在工业中的实际应用。
系统同时提供3D拆装软件学习,高仿真建模,真实的还原机器人插装场景。并且包括工业机器人机械认知、原理认知、机械安装与调试、常见故障排查,故障维修等精选内容。学员可以反复练习,快速掌握机器人拆装技巧。
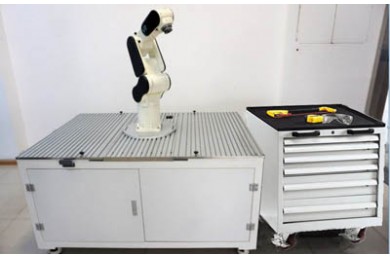
1、本体器件与拆装台
由操作桌、机器人本体散件、控制器散件、工具箱,配件组成。
机器人本体散件:钢体、减速机、电机、本线内线、拖地线、线环、各种小配件、如螺丝等。
控制器配件:机箱,运动控制器,伺服驱动器,电源,线束等;
工具箱:包含了拆装需要的各种工具。
组装完成后的机器人本体,在电控柜的驱动下,能实际完成应用操作。
电控拆装系统参数
1、输入电源:单相三线~220V±10% 50Hz
2、工作环境:温度-10℃~+40℃ 相对湿度≤85%(25℃) 海拔<4000m
3、装置容量:<1.5kVA
4、电控台尺寸:1500mm×800mm×1400mm
5、安全保护:具有漏电保护,安全符合国家标准

二、拆装实训内容
1、机器人本体认知及拆装
本实训平台是学习机器人结构原理、装配、生产现场安装、调试、故障排查及维护教学一体的综合实训平台。本体可以拆装到螺钉级,并提供拆装散件的实物图。
配置详细的“工业机器人本体拆装手册”和全流程视频教程,详细介绍各部分的机械安装、拆解过程,以及注意事项 。
2、机器人电控认知及拆装
学员可以非常直观的观察和学习机器人电控系统的硬件和软件部分。在每一块课程内容中,均将理论与实际操作同时施教,让学员在学习理论的同时通过实训平台实际操作,达到学生学习整个工业机器人电气知识的目的。
配置详细的“工业机器人电控柜拆装手册”和全流程视频教程,详细介绍各部分功能,电气原理图,组装工艺要求等。
3、机器人电控系统调校
完成电控柜组装后,需要结合机器人本体进行电控调试。电控调试的主要内容是机器人每个关节的交流伺服系统调校。交流伺服系统是一个复杂的闭环控制作系统。调校的结果直接决定了机器人运行的平滑性。一个良好的调校,能使机器人在不同的运动速度下,以及不同的动作引起的负载变化,都具有良好的鲁棒性。
配置详细的“工业机器人电控调校手册”,详细讲解了机器人每关节的交流伺服系统的调校,以及经验参数。
4、机器人精度测量
重复定位精度是工业机器人最重要的性能指标之一。 是指机器人在重复一个动作5~10次,每次在同一个点的位置的偏差。测试重复精度的方便很多,比如激光干涉仪。本方案采用工程最常用有效的方法进行测量。
5、机器人标定
虽然机器人的绝对精度很高,但如果未进行标定,那么其轨迹精度一般比较差。机器人的标定操作,是在机器人上运行一段测试程序,驱动机器人运行多个不同位置,并从精度测试仪中读取相应的距离参数。通过上位机的标定软件算法分析,计算出机器人的零位误差或连杆参数误差,并对机器人的零位与连杆参数进行修正,从而使用提高机器人的轨迹精度。
具体操作见“机器人标定手册”;
6、机器人精度自动测量
根据机器人绝对精度测量原理,编写机器人程序,让机器人运行指定长度。在开始执行前,机器人读取数字位线传感器的值,记为启始值。当执行完成后,机器人读取数字位线传感器的值作为结束位置。上位机计算这二个差值,就是实际执行的距离。自动计算出执行的误差。
在不同位置,不同角度,不同运行距离,自动测量精度误差,可以总体评估一个机器人的精度精况。
三、系统软件
1、本体拆装与调试软件
本体拆装3D仿真软件,采用实际机器人本体型号为原型,进行高仿真建模,建立完整真实展现机器人场景。同时,拥有高度逼近真实的表面外观和细节感受,创造出身临其境般的实训体验。使用3D虚拟引擎技术模拟实际操作环境,支持学生在虚拟场景下进行工业机器人机械认知、原理认知、机械安装与调试、常见故障排查,故障维修等操作。
软件特点:
1.采用先进的虚拟仿真技术,采用实际的工业机器人3D模型,模拟机器人本体拆卸与装调等操作实训过程;
2.具备情景化、游戏化实训设计,多个实训项目场景,每个项目教学设计过程涵盖实训示范、演练、测试模块;
3.实训与教学技能符合工业机器人产业职业技能标准要求;
4.能模拟工业机器人本体拆卸、机器人本体装配。具备拆装实训示范、练习和考核功能;
6.能模拟工业机器人整机调试内容。工业机器人装配完成后,能对每个关节调试,了解调试要点;
7、具有工业机器人常见故障排查与维修功能,能模拟大部分故障,提高机器人维修能力;
8、在练习,考核模块中具有对实训过程中操作实时录制功能,并可随时对操作记录进行查看;
9、使用真实的拆装实训场景,并采用3D实时渲染技术,可实现场景内360度旋转,可实时通过鼠标与场景进行交互操作。场景中布置大量机器人知识展板,方便自主学习。
2、机器人离线编程软件
RobotBuilder是一套功能强大的机器人离线编程仿真软件。RobotBuilder可从CAD模型获取工件轨迹,优化后自动生成机器人代码。并可直接倒入目标机器人中运行,也支持目标机器人语言直接编程。从模型到执行代码一站式解决。通过集成的3D仿真功能,建立一个与实际环境相同的虚拟开发环境,并集成了丰富的工艺应用工具包。RobotBuilder是一套解决机器人系统设计、仿真、离线编程的工具,能够适应各种机器人。
软件特点
1、具有离线编程功能,能够直接生成各种品牌机器人的代码。
2、支持多种格式的三维CAD机器人模型倒入。
3、轨迹生成可基于CAD数据,简化轨迹生成过程,提高精度,可利用实体模型、曲面或曲线直接生成运动轨迹。
4、包含丰富的工艺应用工具包,如打磨、喷涂、焊接等。
5、包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限、节拍估算、轨迹自动调整优化等功能。
6、提供工业机器人虚拟示教器、虚拟示教、自动生成仿真运动视频。
7、支持外接真实示教器,通过实际示教器,可控制虚拟机器人,增强体验感。
8、具有机器人外部轴运动,能够实现7、8轴的离线编程功能。
9、支持机器人的虚实同步,虚拟机器人与实际机器人同步运行。
10、支持多台机器人同时仿真,支持复杂应用。
四、实验项目
1、工业机器人认知与基础操作;
2、工业机器人机电系统结构;
3、基本运动指令与简单程序;
4、机器人坐标系设定;
5、典型搬运码垛应用实验-夹取式;
6、典型搬运码垛应用实验-真空吸附式;
7、进阶指令教学;
8、应用偏移指令的搬运实验;
10、电气元件认知实验;
16、基础应用综合实验;
17、视觉色度检测实验;
18、视觉尺寸检测实验;
19、离线编程仿真软件操作实验;
20、离线软件真实示教器编程操作;
21、机器人写字操作实验;
22、机器人IO扩展模块实验;
23、机器人轨迹精度测试实验;
24、机器人标定操作实验;